Organ twin: a “flight simulator” for surgeons
Intelligent artificial organs enhance training and quality of surgery

While young surgeons’ training will always require the guidance and experience of a senior surgeon, artificial intelligence (AI) assisted training methods may one day provide valuable support. By drawing on data, such technologies could enhance training by complementing instruction with information on how a tumor could best be removed from healthy tissue.
Until now, surgical education has been challenging at multiple levels: not only do young surgeons have limited time to practice, they must be supervised by senior surgeons whose schedules are often tight. At the same time, human tissue is hard to come by, and using animals to train students raises ethical concerns. Practicing on patients is also out of the question, as the risk of something going wrong or not meeting medical standards is too high.
Development of artificial organs as training environment
In response to these challenges, researchers at the University of Stuttgart at the Institute of Physical Chemistry have created educational tools that could one day be used to train surgeons, much like flight simulators train pilots. The team, which comprises engineers and medical doctors, have developed a range of artificial organs – among them a liver, a kidney, and a bladder. With these artificial organs, the scientists aim to create a training platform that provides high-fidelity surgical scenes and a quantitative and objective assessment of a trainee’s skills in real time. Ultimately, the scientists want to develop organs that are easily reproducible and standardized, as this would enable their use in the training of surgeons around the world.
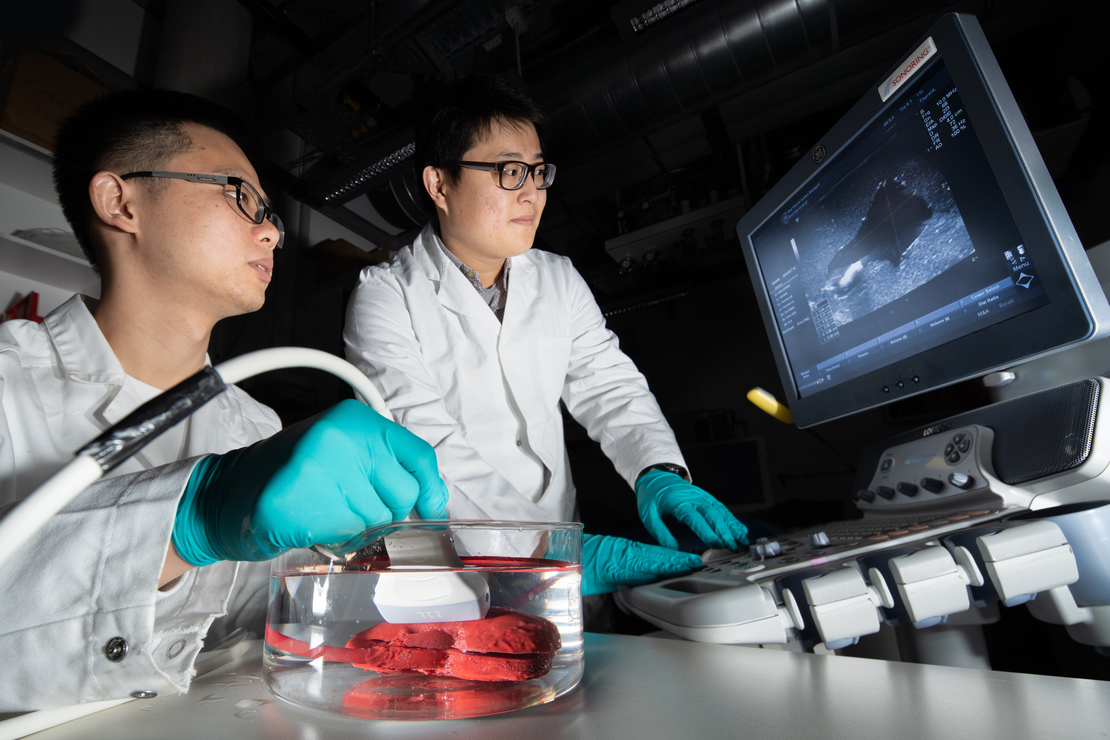
The artificial organs are known as cyber-physical organ twins, which are physical systems combined with virtual features. The consistency of the tissue, the anatomy, the haptic perception, even the look of the tiny blood vessels are very similar to natural organs. Additionally, sensors measure a range of parameters, including the surgeon’s fine motor skills when moving an endoscope through the organ, whether a needle has punctured correctly at the required location, or the time needed to localize all the tumors. An open-source algorithm that is also applied in self-driving cars to distinguish between objects has been re-trained to detect the lesions, such as carcinomas or kidney stones. Once the endoscope reaches the realistic target, the trainee can simulate a biopsy of the protrusion and try to improve the accuracy and efficiency with each session. All the while, data is collected that would not otherwise be available, even in a real surgical procedure on a patient.
Training environment makes evaluation of operations possible
“If we look at computer vision or natural language processing, the data is very rich and structured. But in the area of biomedicine, especially in surgeries, data collection is very difficult. How can the quality of a surgical procedure be quantified? A real-life surgery happens in an environment in which collecting real-time data is almost impossible,” says Tian Qiu, leader of the Cyber Valley Biomedical Microsystems research group at the University of Stuttgart. The group, which focuses on integrating hardware with AI, develops tools that collect large amounts of data in biomedicine in order to learn from it and improve minimally-invasive surgical tools and procedures. The team collaborates closely with physicians from the university hospitals in Freiburg and Tübingen.

“As we aim to enhance the field of biomedicine with artificial intelligence, we combine physical systems with virtual features. This enables us to collect data on surgical skills. Experienced surgeons lay the foundation and then we compare their skills with those of future surgeons. In each training session, we visualize a trainee’s data, assess how the surgery was performed, and evaluate which skills need to be improved,” says Tian Qiu.
The team recently published the results of its work in three journal papers and one conference paper. In one of these papers, they present a soft liver phantom that can assess how well an endoscopic inspection and tumor biopsy is performed inside the hollow biliary ducts that weave through the liver. Creating a realistic soft liver replica is a challenging task. “Our organ phantoms offer much more objective evaluations and feedback, much better than virtual reality simulators can, for instance,” says Xiangzhou Tan, who is a physician at the University Hospital Tübingen and brings medical expertise to the Biomedical Microsystems group.
Manipulating an endoscope, a long and thin instrument, equipped with a miniature camera at the tip, operated outside the patient’s body, is another important part of a surgeon’s training. “One prototype we developed can measure specific endoscopic controlling skills,” explains Do Yeon Kim, a Ph.D. student and engineer in the group. “When a trainee navigates through an organ, many factors are considered. For instance, they must assess how long it takes them to screen all areas inside the organ and make sure they haven’t missed anything and that they have detected all the tumors in a reasonable amount of time.” To evaluate manipulation skills, Do Yeon Kim trained the algorithm with data that experienced doctors provided. A trainee’s performance is then measured against these thresholds. “One could say we have created an advanced flight simulator for surgeons.”
References of recent publications on the topic of cyber-physical organ twin:
- Liver phantom and needle puncture skill assessment
Tan, X., Li, D., Jeong, M., Yu, T., Ma, Z., Afat, S., Grund, K.-E. & Qiu, T. Soft Liver Phantom with a Hollow Biliary System, Ann. Biomed. Eng. 2021. https://doi.org/10.1007/s10439-021-02726-x - Bladder phantom with blood vessels and tumors for endoscopy
Choi, E., Waldbillig, F., Jeong, M., Li, D., Goyal, R., Weber, P., Miernik, A., Grüne, B., Hein, S., Suarez-Ibarrola, R., Kriegmair, M. C. & Qiu, T. Soft Urinary Bladder Phantom for Endoscopic Training. Ann. Biomed. Eng. 2021. https://doi.org/10.1007/s10439-021-02793-0 - Endoscopic training and skills assessment
Tan, X., Kim, D. Y., Jeong, M., Li, D., Miernik, A. & Qiu, T., Computer-Assisted Quantitative Assessment of Endoscopic Skills based on a High-fidelity Endourological Phantom. Under revision.
Kim, D. Y., Tan, X., Jeong, M., Li, D. & Qiu, T., Computer-Assisted Quantitative Assessment of Endoscopic Skills based on a Urological Phantom. 55th DGBMT Ann. Conf. on Biomed. Eng. Accepted.
Video

Related Articles

Funded Doctoral Positions at the International Max Planck...

Groundbreaking Ceremony for the Cyber Valley Building in ...